使用桁架机器人的方法及应用范围
桁架机器人是指可以完成自动控制,可重新编程,多自由度和运动自由度以在空间中建立直角连接的多功能操纵器。也称为大矩形桁架。龙门机器人的操作方法主要是通过完成沿X,Y和Z轴的线性运动来执行的。
桁架机器人以XYZ桁架系为基本数学模型,以伺服电机和步进电机驱动的单轴机械臂为基本操作单元。滚珠丝杠,同步带以及齿条和小齿轮是常用的传动方法。所构建的机器人系统可以完成任意到达并遵循XYZ三维桁架系中可控的运动轨迹。
桁架机器人使用运动控制系统来完成其驱动和编程控制。诸如直线和曲线之类的运动轨迹的生成是一种多点插值方法。操作和编程方法以指导性的编程方法或桁架定位方法为指导。行动自如,分析应用程序需求:每个机器人都是根据特定需求的发生而计划的。计划的第一步是清楚地分析应用程序需求,并确定计划期间要考虑的参数,包括:机器人定位精度,重复定位精度;机器人的负载大小和负载特性。
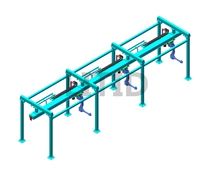
机器人运动的自由度数,每个自由度的运动行程;机器人的工作周期或速度,加速和减速特性;机器人的运动,运动的相关性;机器人的操作环境和设备;长寿机器人的操作系统和操作;其他特殊要求。此机械模型的初始构造:机器人可以从机械结构大致分为龙门结构,壁挂结构和悬挂结构。根据设备空间的要求选择不同的结构。每个结构的机械特性和运动特性都不同。后续计划需要基于已确认的结构。